RTH Flugprofil
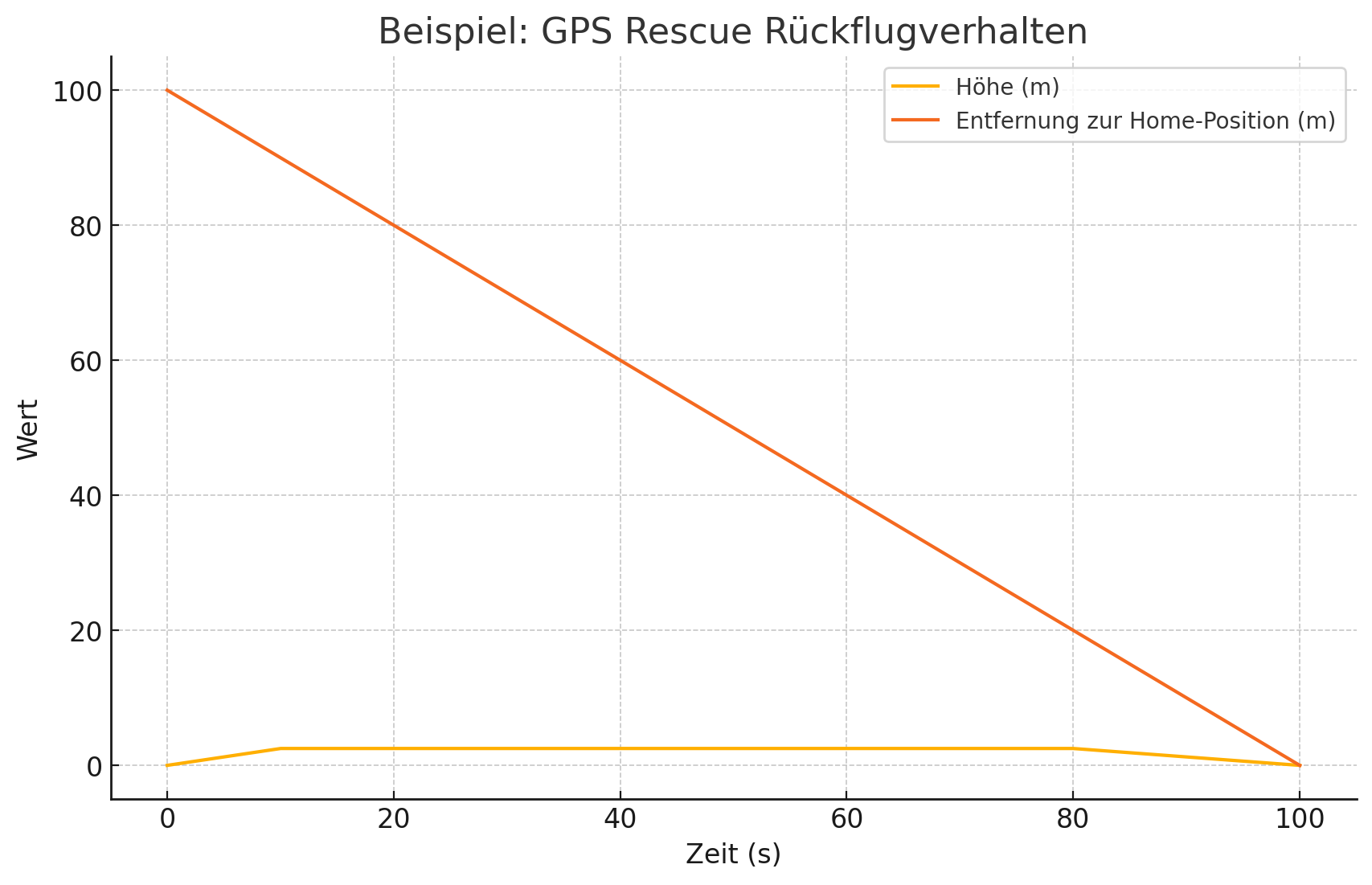
Hier siehst du ein Beispiel-Diagramm, das das GPS-Rescue-Verhalten visualisiert:
- Gelbe Linie: Höhenprofil der Drohne
- Schneller Anstieg auf die Rückflughöhe (~2,5 m)
- Konstanthöhe während des Horizontalrückflugs
- Abstieg auf 0 m, sobald sie sich nahe der Home-Position befindet
- Orange Linie: Entfernung zur Home-Position
- Lineares Sinken von der Ausgangs-Distanz (hier 100 m) bis auf 0 m
Das Diagramm gibt dir einen Eindruck, wie deine Drohne in Failsafe-Situationen automatisch steigt, zum Startpunkt zurückfliegt und dann sanft landet.
➡️ Nächste Schritte/Test:
- Passe im Skript die Rückflughöhe (initial_alt/return_alt) und die Sinkdistanz (descent_dist) an dein Gelände an.
- Messe im realen Test die benötigte Schwebedrehzahl für gps_rescue_throttle_hover und justiere den Wert.
- Führe Tests mit verschiedenen Entfernungen durch, um das Verhalten zu verifizieren.