Luftdrucksensor
🔌 BMP280 an MEPS SZ Mini F7 anschließen (I2C)
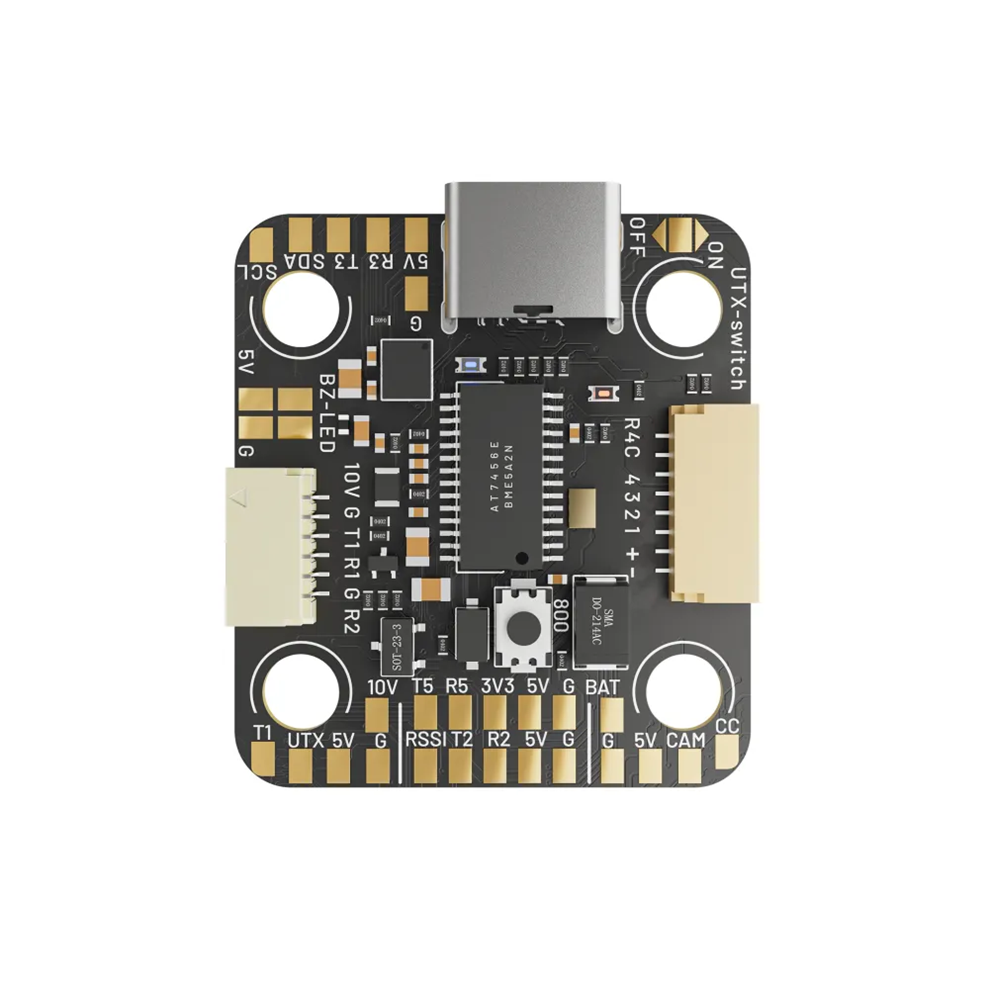
Auf deinem Bild ist ganz oben links eine deutlich markierte I2C-Schnittstelle vorhanden:
🟢 I2C-Pins (oben links):
- SCL – I2C Clock (ganz links)
- SDA – I2C Data (direkt daneben)
- 5V – Versorgungsspannung (3. von links)
- G – Ground (4. von links)
📌 Anschluss des BMP280:
Verbinde deinen BMP280 wie folgt:
|
BMP280 Pin |
FC Pin |
Position (auf dem Bild) |
|
VIN |
5V |
3. von links (oben links) |
|
GND |
G |
4. von links (oben links) |
|
SCL |
SCL |
ganz links (oben links) |
|
SDA |
SDA |
2. von links (oben links) |

Achte auf die Spannung deines BMP280-Moduls – die meisten fertigen Breakout-Boards akzeptieren 3.3–5V, aber doppelt prüfen lohnt sich!
🛠️ Fehlerhafte Barometer-Werte nach Einbau von GPS oder kein Baro und kein Magnet hat die folgende Ursache
Achtung!! Wenn die FlightControl nur mit USB angeschlossen wird, dann wird in INAV nur das GPS-Modul erkannt. Kompass und Barometer benötigen mehr Spannung. Also endweder die Propeller ab - falls bereits geschehen, eine Batterie anschließen, dann sollte in INAV GPS, Baro und Magnetometer verfügbar sein.
Prüfen im CLI mit Status
Sensor status: GYRO=OK, ACC=OK, MAG=UNAVAILABLE, BARO=UNAVAILABLE, RANGEFINDER=NONE, OPFLOW=NONE, GPS=NONE
Batterie anschließen und erneut den Status ausgeben lassen.
Sensor status: GYRO=OK, ACC=OK, MAG=OK, BARO=OK, RANGEFINDER=NONE, OPFLOW=NONE, GPS=NONE
Dass ich hier ein GPS=NONE habe liegt daran ich habe noch kein GPS-Fix bekommen!
⚙️ Software-Konfiguration (INAV empfohlen)
Falls du INAV nutzt, aktiviere das Barometer:
- Öffne den INAV Configurator
- Gehe zu "Configuration"
- Aktiviere den Barometer-Support
- Unter CLI kannst du prüfen:
bash

status
sensors
Wenn alles korrekt verbunden ist, sollte angezeigt werden:
vbnet

baro: BMP280 detected on I2C bus
🛠️ Hinweis bei Nutzung von Betaflight
Betaflight unterstützt Barometer nur sehr eingeschränkt (nur zur Telemetrie). Wenn du also wirklich Baro-Navigation willst (z. B. für autonome Missionsflüge, Hold-Modi etc.), nutze INAV.

INAV, wie du deinen BMP280 Barometer-Sensor in INAV auf der MEPS SZ Mini F7 Flight Control einrichtest
✅ Voraussetzungen
- BMP280 ist über I2C korrekt verbunden (wie vorher beschrieben).
- INAV Firmware ist auf der FC installiert (z. B. über INAV Configurator).
- USB-Verbindung zur FC funktioniert.
🛠️ Schritt-für-Schritt Konfiguration
🔹 1. INAV Configurator installieren
- Lade den INAV Configurator von https://github.com/iNavFlight/inav-configurator/releases
- Installiere und öffne ihn.
🔹 2. Verbindung zur FC herstellen
- Verbinde die FC via USB mit deinem PC.
- Wähle den richtigen COM-Port oben rechts im Configurator.
- Klicke auf "Connect".
🔹 3. Backup erstellen (optional, aber empfohlen)
- Gehe zu „CLI“.
- Gib ein:
bash

diff all
- Kopiere die Ausgabe und speichere sie als Backup.
🔹 4. Sensor aktivieren
Gehe zu:
- Configuration Tab
- Scrolle zu "Barometer"
- Aktiviere das Häkchen bei "Enable Barometer"
- Wähle „BMP280“ falls verfügbar (meist wird das automatisch erkannt).
✅ Speichern und neu starten klicken.
🔹 5. Sensorprüfung
Nach dem Neustart:
- Gehe zu „CLI“
- Gib ein:
bash

status
Achte auf eine Zeile wie:
vbnet

baro: BMP280 detected on I2C bus
Oder:
bash

sensors
→ Dort wird der BMP280 explizit angezeigt, wenn erkannt.
🔹 6. Höhe prüfen
Gehe zu "Sensors" Tab (oben in der Leiste):
- Dort sollte jetzt ein Barometer-Wert sichtbar sein (meist Höhe über Meeresspiegel in Metern).
- Leicht auf und ab bewegen → der Wert sollte sich ändern.
🔹 7. Failsafe & Modi anpassen (optional)
Wenn du automatische Flugmodi wie "Alt Hold" oder "Cruise" nutzen willst:
- Gehe zu Modes
- Füge z. B. "Altitude Hold" einem Schalter zu
- Optional: Konfiguriere Missionsmodi wie „NAV POSHOLD“ oder „NAV CRUISE“ → Barometer wird dafür benötigt.
🔄 Optional: CLI Setup überprüfen
Falls dein Sensor nicht erkannt wird, kannst du im CLI die Adresse prüfen (Standard ist 0x76):
bash

get baro_bmp280_address
Wenn du ein anderes Modell hast (manche sind auf 0x77), ändere sie so:
bash

set baro_bmp280_address = 0x77
save
🧪 Test vor dem Flug
- Montiere alles sicher.
- Kalibriere ACC und Magnetometer.
- Schau unter „OSD“ oder via Telemetrie (z. B. mit OpenTX/EdgeTX), ob Baro-Höhe korrekt übermittelt wird.
🟢 Fertig!
Dein BMP280 ist jetzt in INAV aktiv und einsatzbereit für barometrisch gesteuerte Flugmodi. Du kannst jetzt z. B. automatisches Altitude Hold, Loiter (PosHold) und Mission-Pläne mit Höhenangabe nutzen.