GPS
 GPS, Kompass und Barometer
GPS, Kompass und Barometer
Meine Flight Control [SpeedyBee F405 V4] hat einen eingebauten Baro Sensor. Wenn ich nun mein GPS-Modul anschließe bekomme ich keine BARO-Werte mehr angezeigt.
Hier ist das Wiring meiner FC:
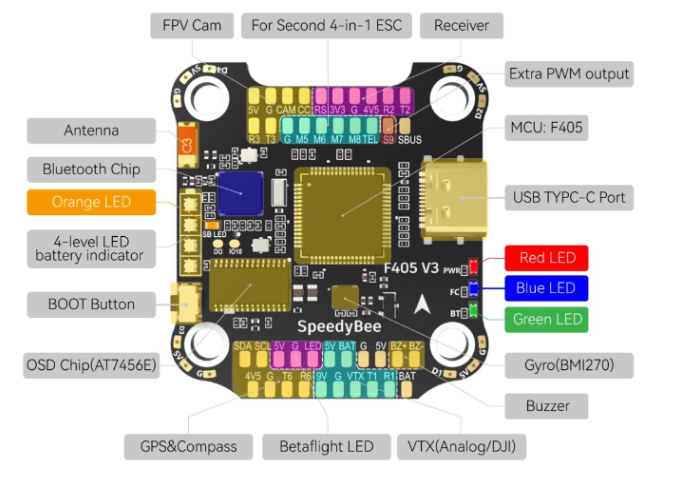
Das GPS Modul habe ich gemäß der Anschlussbelegung an SDA, SCL, 4V5, G, T6 und R6 angeschlossen. Der CLI Befehl set inav_use_gps_no_baro wurde leider entfernt. Was kann man nun tun?
✅ Ursache
Bei iNav (seit Version 6.x aufwärts) wird die Barometer/GPS-Logik anders behandelt:
- Der Parameter inav_use_gps_no_baro wurde entfernt.
- Jetzt entscheidet automatisch iNav, ob ein Baro oder GPS für Höhenmessung verwendet wird.
- Wenn dein Baro beim Anstecken des GPS „verschwindet“, liegt es nicht an iNav, sondern daran, dass I²C-Adresse oder Pins kollidieren.
🧩 Lösungsschritte
1. Prüfe, ob der Baro überhaupt erkannt wird
Verbinde dein FC mit dem CLI und gib ein:
status
→ Wenn dort kein BARO angezeigt wird, ist er hardwareseitig nicht erreichbar.
2. Baro- und GPS-Anschluss prüfen
Der SpeedyBee F405 V4 hat:
- Integrierten Baro auf dem I²C-Bus 1
- GPS sollte auf UART2 (TX2/RX2) angeschlossen werden
NICHT auf den I²C-Pins (SDA/SCL)
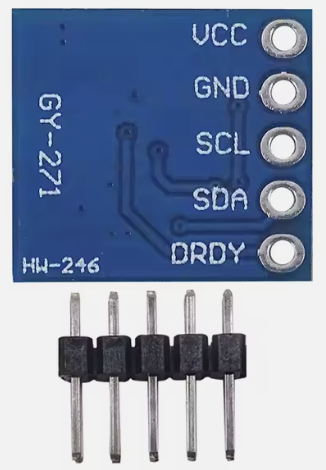
🔧 Wenn du dein GPS an SDA/SCL angeschlossen hast (z. B. weil es auch ein Kompassmodul mit I²C ist), blockiert es den Baro!
👉 Lösung:
- Verbinde nur GPS TX/RX an UART (z. B. TX2/RX2)
- Verbinde den Kompass (magnetometer) separat an SDA/SCL
3. Ports in iNav richtig konfigurieren
In der iNav Configurator:
- Ports → Stelle sicher:
- GPS: UART2 → „GPS“ aktivieren
- I²C1: für Baro und Kompass aktiv
- Dann speichern und neu starten.
4. Überprüfen, ob beide Sensoren aktiv sind
Nach Neustart:
status
→ Du solltest sehen:
BARO detected
GPS detected
5. (Optional) iNav-Version prüfen
CLI:
version
Wenn du unter iNav 6.1 bist, update am besten auf iNav 7.x, da der F405 V4 dort nativ unterstützt wird.